






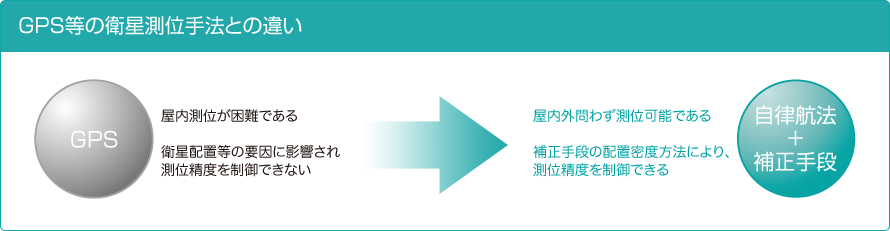
自律型センサ(加速度・磁気・角速度)に基づいて、基準点からの相対移動を計測する技術である。 DRは移動距離に比例して誤差が累積するため、外部の補正測位手段(例:BLEビーコン測位・マップ)との組み合わせにより、高精度測位が実現する

慣性センサ出力に基づいて、センサ(計測装置)の絶対姿勢を推定する

磁気センサの出力に基づいて、磁場状態に応じて水平方位を補正する

移動検出し、その大きさ(歩行速度)を推定する

移動方向を自動推定する。様々な保持状態に対応する

他の測位手段(例:BLEビーコン・マップ)の出力を推定結果に取り込む


Dead Reckoning(自律航法)
自律航法とは、センサ(加速度・角速度・磁気)に基き、基準点からの相対位置を推定する技術~人物、そして車輪付移動体の測位が可能

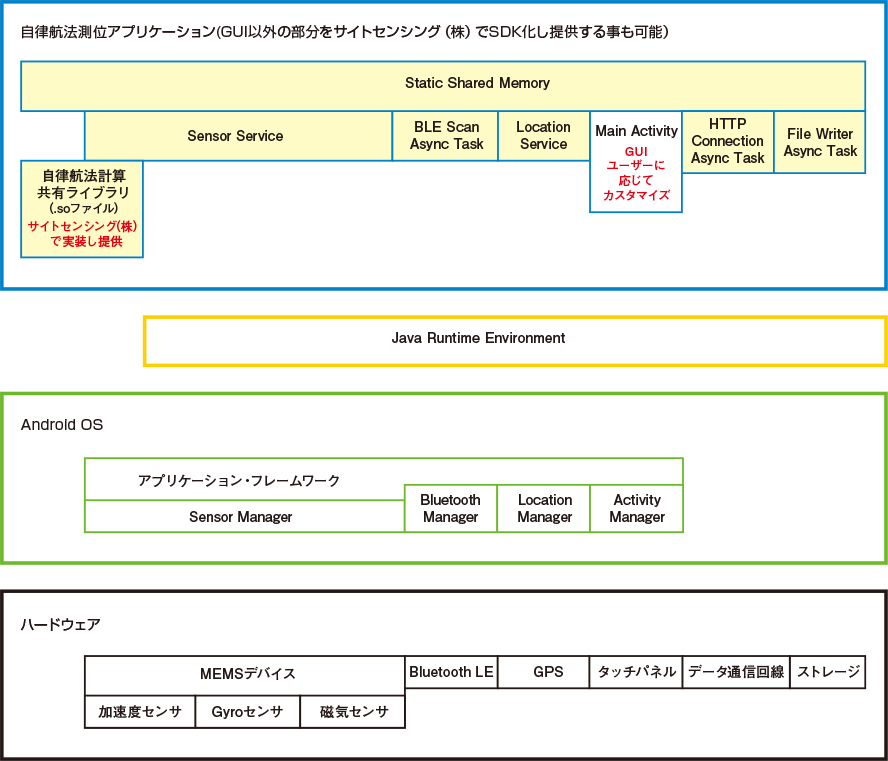

次の要件を充たすスマートフォン
- OS:Android 7.0以上
- RAM:4.0GB以上
- 加速度センサ、磁気センサ、Gyroセンサ、Bluetooth内蔵

![]()
copyright (c) SITESENSING,inc. All rights reserved.